leveldb Minor Compaction
Compaction Strategy
ref: LSM Tree-Based 存储引擎的 compaction 策略比较
ref: Leveled Compaction in RocksDB
ref: This post revealed the performance of size-tiered compaction.
ref: This post revealed the performance of leveled compaction.
从 LSMTree 的名字就知道 Merge 操作是核心。Merge 也被称为 Compact,因为 Merge SSTable 的过程中必然会清除掉一些无效的 InternalKey,从而减少磁盘开销。
主流的 Compaction 策略包括 size-tiered compaction 和 leveled compaction。同样是分区存储,前者采用单文件的方式,限制分区下的 SSTable 的大小;后者采用多文件的方式,限制分区下的 SSTable 数量。
那么如何衡量一个 Compaction 策略的好坏?可以类似于衡量算法性能,从时间和空间两方面进行。
Time Complexity
在存储领域,需要注意到数据的操作耗时实际上是与数据的规模有紧密联系的。
针对写操作,需要评估 compact耗时/compact数据量 的比值;
针对读操作,二分查找的方式已经决定了读操作的时间复杂性上界,而数据量则是明确了操作耗时,所以 compact 操作减少数据量能提升查询效率。
Space Complexity
在存储领域空间复杂性才是考量的重点,需要在以下三个指标间权衡:
- 读放大效果:读取数据时实际读取的数据量大于真正的数据量。例如在LSM树中需要先在MemTable查看当前key是否存在,不存在继续从SSTable中寻找。
- 写放大效果:写入数据时实际写入的数据量大于真正的数据量。例如在LSM树中写入时可能触发Compact操作,导致实际写入的数据量远大于该key的数据量。
- 空间放大效果:数据实际占用的磁盘空间比数据的真正大小更多。上面提到的冗余存储,对于一个key来说,只有最新的那条记录是有效的,而之前的记录都是可以被清理回收的。
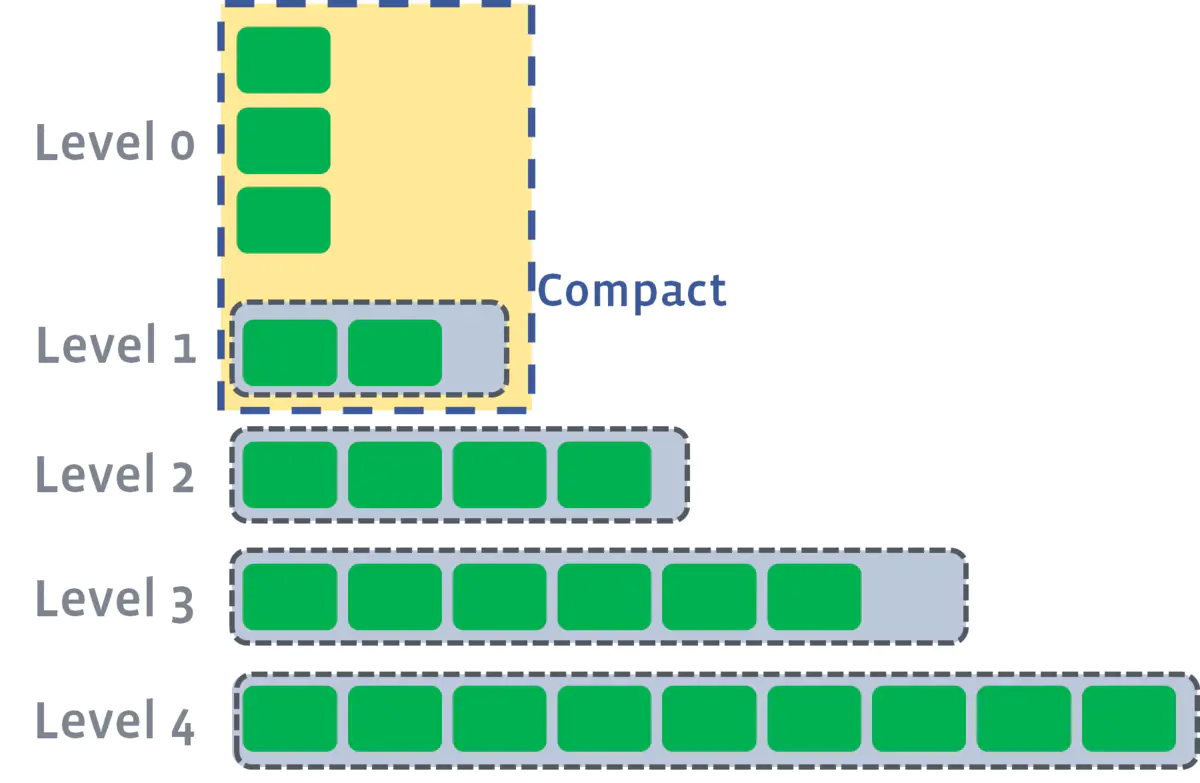
从结果来看,size-tiered compaction 存在空间放大的缺陷,leveled compaction 存在写放大的缺陷。所以产生了一个优化点,即将两种策略进行混合。
RocksDB 的做法是,在L1层及以上采用 leveled compaction,而在L0层采用 size-tiered compaction(在 RocksDB 中也称为 universal compaction)。如下图所示:
Compaction Stages
Compaction 一共可分为三种(三阶段): Minor Compaction、Major Compaction 以及 Seek Compaction。
- Minor Compaction 特指将位于内存中的 Immutable MemTable 持久化至硬盘中。
- Major Compaction 则是 leveldb 运行中最为核心的数据合并过程,主要是将位于不同层级的 SSTable 进行合并,以减少同一个 Key 的存储空间。
- Seek Compaction 则主要用于优化查询效率,后文将会详述此过程。
Parallel Compaction
在 Major Compaction 过程中,如果两个 Compact 操作是不相交的,那么显然可以将这些操作分散到多个线程中去。(实际上,这也是 RocksDB 的一个优化点。)
Minor Compaction
Minor Compaction 相对于其它两者要更简单一些,并且是所有 SSTable 的“出生地”,即在 Minor Compaction 中,将会调用上一篇提到的 BuildTable() 方法创建 SSTable,并将 Immutable MemTable 的内容写入。
Minor Compaction 的触发时机
在前面的 leveldb Key-Value 写入流程分析 一篇分析中,其实就有提到过 Minor Compaction。即当 MemTable 已经没有剩余的写入空间,并且 Immutable MemTable 不存在时,会将当前的 MemTable 转变为 Immutable MemTable,并初始化一个新的 MemTable
以供写入,同时主动地触发 Minor Compaction,即显式调用 MaybeScheduleCompaction() 方法。
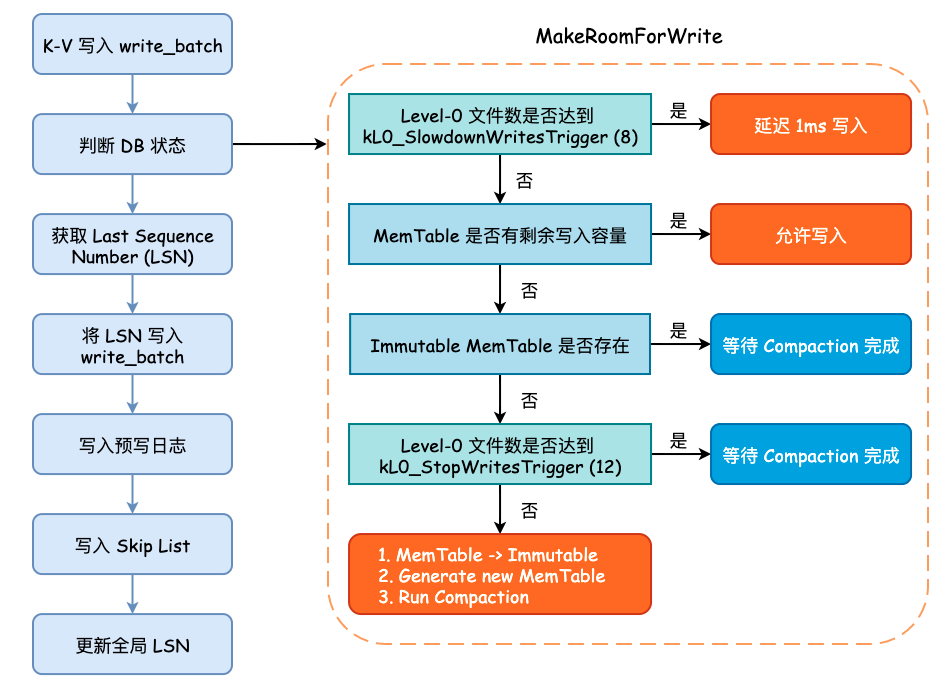
上图为 leveldb Key-Value 写入过程,我们只需要关注何时进行 Run Compaction 即可。另一点需要注意的是,所有 Compaction 的入口都是 MaybeScheduleCompaction() 方法,其实现如下:
/* Compaction 入口函数 */
void DBImpl::MaybeScheduleCompaction() {
mutex_.AssertHeld();
if (background_compaction_scheduled_) {
// Already scheduled
} else if (shutting_down_.load(std::memory_order_acquire)) {
// DB is being deleted; no more background compactions
} else if (!bg_error_.ok()) {
// Already got an error; no more changes
} else if (imm_ == nullptr && manual_compaction_ == nullptr &&
!versions_->NeedsCompaction()) {
// No work to be done
} else {
/* 设置 background_compaction_scheduled_ 标志位,并将 BGWork 方法加入线程池中 */
background_compaction_scheduled_ = true;
env_->Schedule(&DBImpl::BGWork, this);
}
}
可以看到,该函数不接受任何参数,也就是说,到底该运行哪种 Compaction 是由 DBImpl::BGWork 所决定的。env_->Schedule 其实就是将 Compaction 任务提交至任务队列中,由后台工作线程从任务队列中取出并执行。
任务队列是用户实现的单工作线程的 Event-Loop,db_impl 没有将 schedule 相关部分分离出来。这里实现的比较简洁,因为并非系统的 bottleneck,实际上调用 libuv 等库也是一种不错的选择。
Minor Compaction 的具体过程
Minor Compaction 的入口点为 CompactMemTable() 方法,方法内部主要调用 WriteLevel0Table() 方法。
WriteLevel0Table()主要完成了三件事情:
- 根据 MemTable 构建新的 SSTable,假设该 SSTable 叫做 New SSTable;
- 根据 New SSTable 中的 Key 与其他 level 的 Key 重叠情况,决定将 New SSTable 放入到哪一层;
- 记录 New SSTable 的元数据,包括文件大小、构建持续时间以及最终所在的 level 信息。
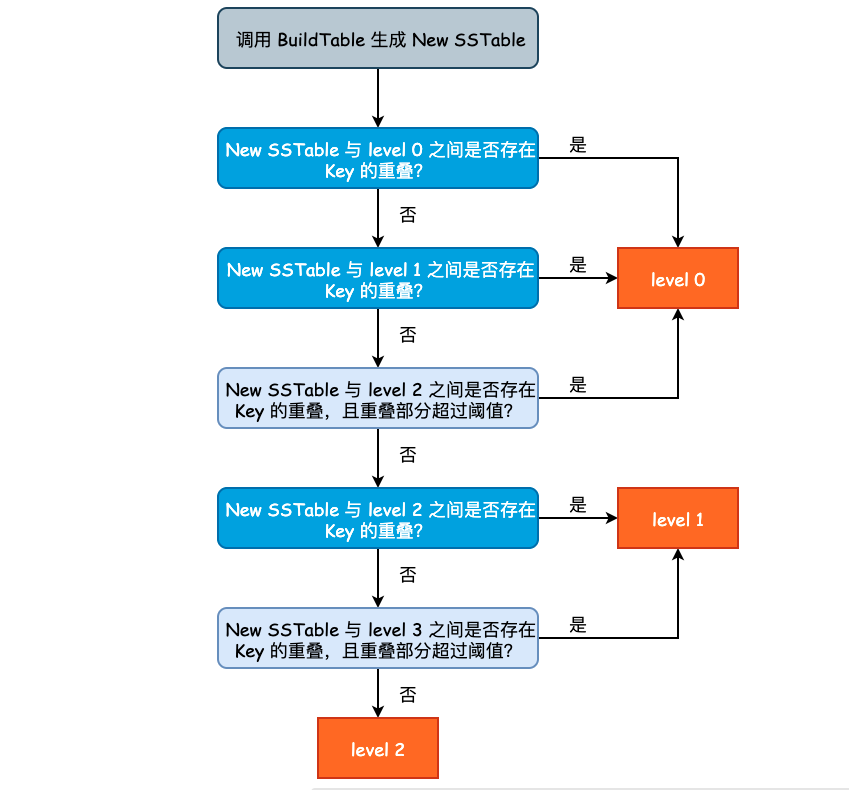
Build SSTable 的过程可参考上一篇文章的内容,不再赘述。新产生的 SSTable 不一定总会出现在 level 0 层。这是因为如果 level 0 层的 SSTable 产生速度过快或者过多时,将会影响 leveldb 整体的查询效率,因为在查询的最坏情况下,我们需要遍历 level 0 中的所有 SSTable。因此,假如说 New SSTable 的 Key 和 level 2 层的 Key 没有任何重叠,并且和 level 3 之间只有少数 Key 重叠时,我们完全可以将 New SSTable 放置于 level 2 层。
决定新产生 SSTable 的层次的过程在 PickLevelForMemTableOutput()方法,其实现逻辑有些绕,因此就不贴源代码了,流程图如下图所示:
levledb 通过参数 kMaxMemCompactLevel(定义在 db/dbformat.h) 来控制 New SSTable 最高可被推到哪一层,默认值为 2,也将就是说,New SSTable 最多能够被推到 level 2 中。但是注意到总层数(kNumLevels)为 7,避免 New SSTable 被推得过远,也尊重了局部性原理。
从优化查询的角度来说,New SSTable 在满足一定的条件时,应尽可能地被推入到除 level 0 层之外的其它 level。但是又不能推的过高,否则查询和 Compaction 都会出现额外的开销。因此,leveldb 指定了 kMaxMemCompactLevel 参数,由该参数来控制 New SSTable 最高可以被推送至哪个 level。